【姫路ロボ・チャレンジ】第15回大会 エントリークラス
出場ロボット&オペレータ
2012年夏の【姫路ロボ・チャレンジ】第15回大会、1日目の12月15日(土)はエントリークラスです。
エントリークラスは、高校生までのロボット競技会初心者のクラスです。スタンダードクラスを目指して、がんばってください!
エントリークラス出場ロボットの顔ぶれ(最終版)
ロボット競技会に初参加や初心者のみなさんの大会です。どのロボットが優勝しそうですか?
お気に入りのロボットを、ぜひ会場で応援しよう!
写真をクリックすると、大きな写真が見られます。
| No. | 出場ロボット | 写真 | 操縦者 |
|---|---|---|---|
| 1 | グレート・サセプタンス
|
 |
電光石火 http://www.hyogo-c.ed.jp/~nishiwaki-ths/ |
| 2 | マックスII
|
|
けいすけ 今度は負けないぞ☆ |
| 3 | ASN-R
|
 |
シャツ男(シャツオ) 初出場なので頑張りたいです。 (記載ミスがありまたので訂正しました) |
| 4 | AMAGO-04(アマゴー04)
|
 |
ゼンノ がんばります!! |
| 5 | AMAGO-05(アマゴー05)
|
 |
須賀(スガ) がんばります!! |
| 6 | AMAGO-06(アマゴー06)
|
 |
大浜(オオハマ) がんばります! |
| 7 | bonaparte(ボナパルト)
|
 |
天斗(タカト) はじめての参加なのでガンバリたいです。 |
| 8 | JHS001
|
 |
まこっち 初めまして、奈良県立王寺工業高等学校 2年 情報処理部の大橋 哲哉と申します。今回が初めての大会となりますので、初心者なりに全力を尽くして頑張りたいと思います。 |
| 9 | アンド
|
 |
アンド がんばります |
| 10 | エイジ
|
 |
エイジ 滅ぶのは天命に非ず |
| 11 | ザク
|
 |
ザク 運は天に在り |
| 12 | 飾工005
|
 |
飾工005 がんばります |
| 13 | アイネス
|
 写真がないの 写真がないの |
アイネス 仲間の思いと愛と基板を背負って会場に笑顔を運ぶために頑張ります。応援よろしくお願いします。 |
| 14 | ロ没(ろぼつ)
|
 写真がないの 写真がないの |
ロ没(ろぼつ) ロ没は伊達じゃない!! |
| 15 | Phoenix (フェニックス)
|
 |
河端 一紘 完璧に動くロボットを目指して頑張ります。 |
| 16 | カメール
|
 |
村岡 伸哉 |
| 17 | M男
|
 |
舩生 将也 |
| 18 | ラファール
|
 |
佐藤 大介 3つの競技で3冠を目標にして、頑張ります。 |
| 19 | PHENOM (フェノム)
|
 |
三原 諒真 初出場なので頑張りたいです。 |
| 20 | 鉄人(テツジン)
|
 |
重田 智広 頑張ります。 |
| 21 | Gland Finale(グランド フィナーレ)
|
 |
中尾 颯生 今大会も優勝できるように頑張ります! |
| 22 | サバイバー
|
 |
坪谷 勇希 初参加なので、次につながる大会にしたいです。何かをつかめるように頑張ります。 |
| 23 | Xenon(ゼノン)
|
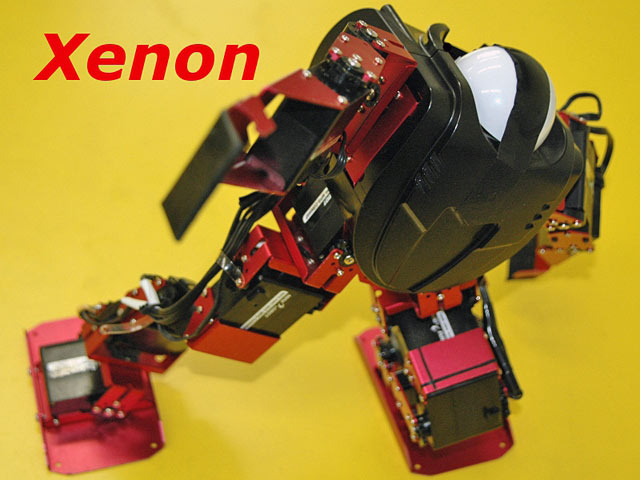 |
おいちゃん |
| 24 | Black Joker(ブラックジョーカー)
|
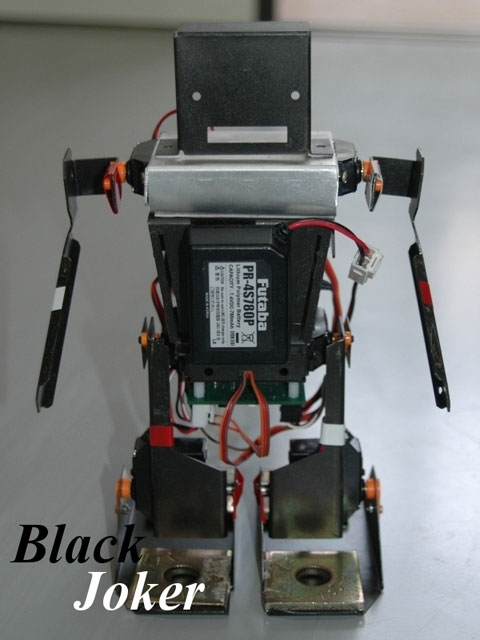 |
Joker |
| 25 | Modern Boy(モダンボーイ)
|
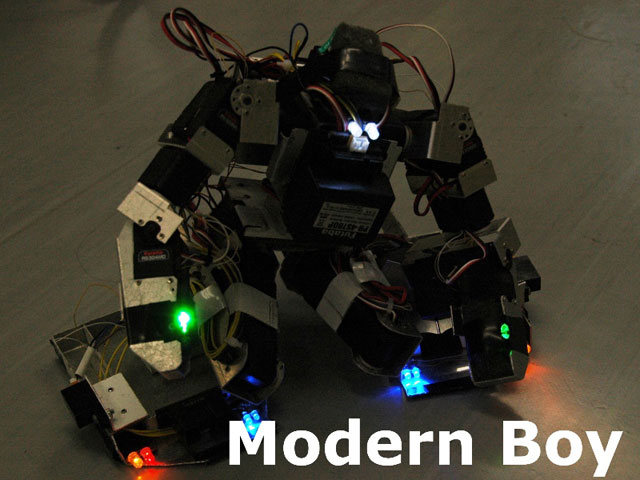 |
やのはじめ |
| 26 | Javelin(ジャベリン)
|
 |
Breaker |
| 27 | TK-コマンド(ティケイ-コマンド)
|
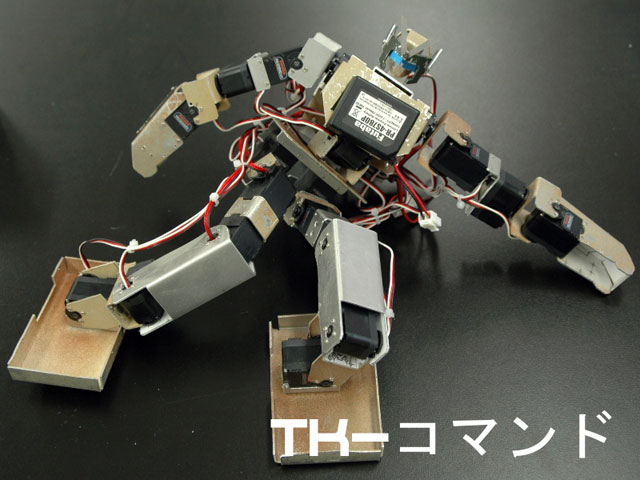 |
はまちゃん |
| 28 | TK-デラックス(ティケイ-デラックス)
|
 |
ふじばやし |
| 29 | TK-REX改(ティケイレックス カイ)
|
 |
あかまつ |
| 30 | TK-03
|
 |
カタヤマ |
| 31 | TK-02
|
 |
なかつか |
| 32 | TK-01
|
 |
オダ |
| 33 | Volkermord(フェルカーモルト)
|
 |
かわぐち |
| 34 | ニルねぇ
|
 |
黒猫 神戸工科高校は定時制の学校で、科学技術高校と同じ校舎で学んでいます。初参戦ですが、一懸命頑張りますので、よろしくお願いします! |
| 35 | 13号機
|
 |
ぴすたちお 神戸工科高校は定時制の学校で、科学技術高校と同じ校舎で学んでいます。初参戦ですが、一懸命頑張りますので、よろしくお願いします! |
| 36 | YUMETO
|
 |
置き傘 神戸工科高校は定時制の学校で、科学技術高校と同じ校舎で学んでいます。初参戦ですが、一懸命頑張りますので、よろしくお願いします! |
| 37 | ニセハシサマー
|
 |
ゴッキー 神戸工科高校は定時制の学校で、科学技術高校と同じ校舎で学んでいます。初参戦ですが、一懸命頑張りますので、よろしくお願いします! |
| 38 | シュプーウイング
|
 |
ベー 神戸工科高校は定時制の学校で、科学技術高校と同じ校舎で学んでいます。初参戦ですが、一懸命頑張りますので、よろしくお願いします! |
| 39 | QB
|
 |
イナホ@姫工ろぼらぼ
|
| 40 | HELIOS(ヘリオス)
|
 |
コヴ@姫工ろぼらぼ 謙虚に、素直に、感謝の気持ちを持ってできる人になる! |
| 41 | シュバルツァ・レーゲン
|
 |
つぼドン@姫工ろぼらぼ 高校最後の大会なので、入賞できるように頑張>ります。 |
| 42 | アルトヴァイエルン
|
 |
よっしぃ@姫工ろぼらぼ ガンバります! |
| 43 | emethmeth(エメトメト)
|
 |
4416@姫工ろぼらぼ いい成績が残せるようガンバります! |
| 44 | サイファ
|
 |
まりか@姫工ろぼらぼ 入賞できるようガンバります! |
| 45 | raptor(ラプター)
|
 |
RRST(アールアールエスティ) 初めて作ったロボットですが,少しでも上を目指して頑張ります |
| 46 | Kan☆ヨティ
|
|
かんちゃん |