| No. |
ロボットの名前 |
写真 |
操縦者 |
| 1 |
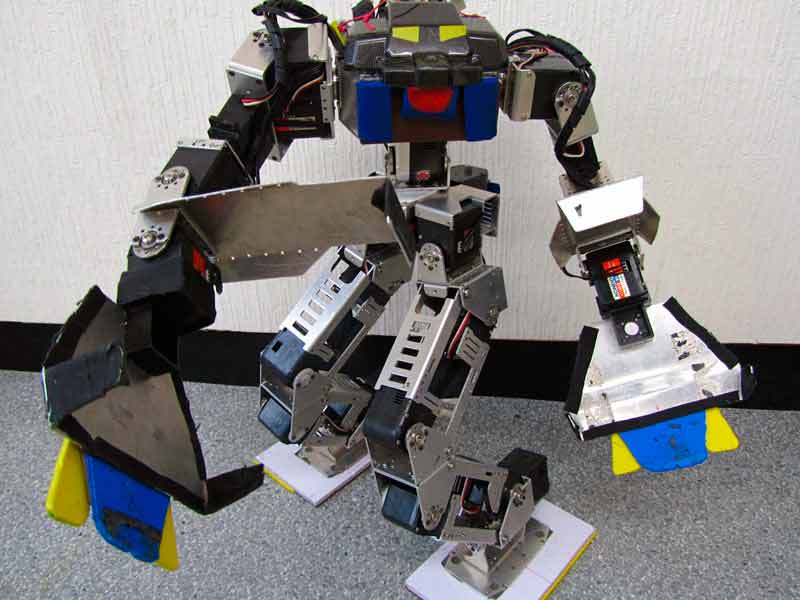
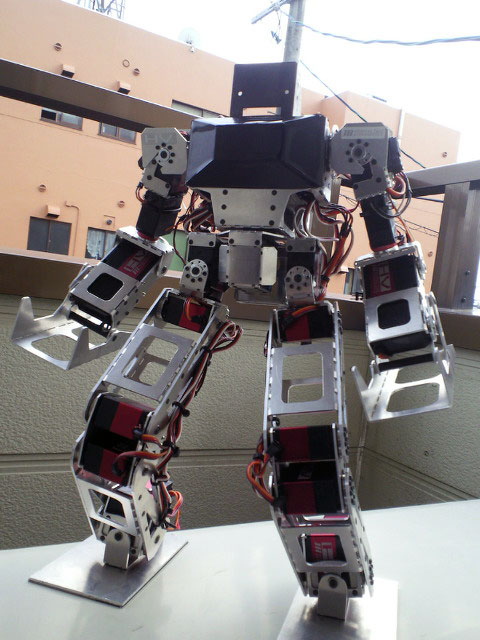
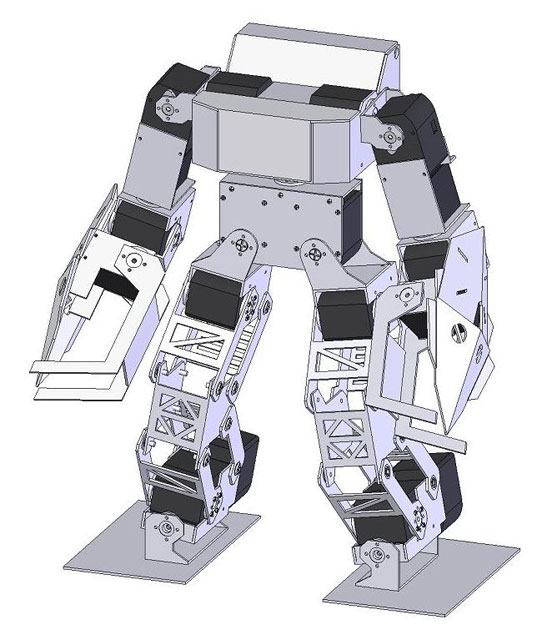
で・か〜る
- サーボモーター数:24個
- 最大軸トルク:27kg/cm
- 身長:52cm
- 重量:2.85kg
- 脚部長さ:34.5cm
- 両腕最大長:72cm
- 最大足裏サイズ:15cm
|
 |
道楽、
- 戦歴は多数(通産150回くらい?)
- 直近のROBO-ONEでは決勝トーナメントに出るも連続して1回戦負け
1年半ぶりの参加になります。よろしくお願いします。http://blog.goo.ne.jp/douraku_ten/
|
| 2 |
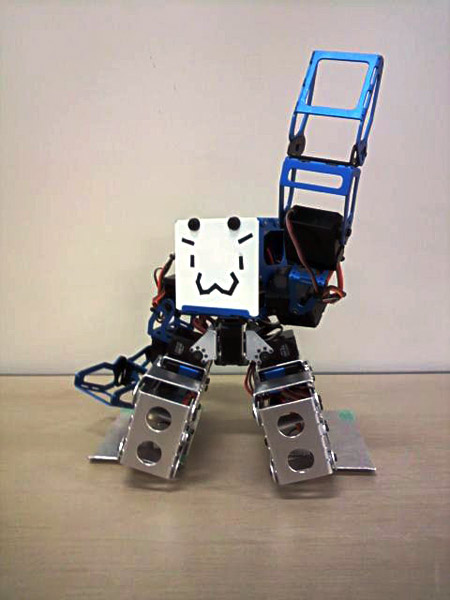
へるむがいすと
- サーボモーター数:17個
- 最大軸トルク:29.5kg/cm
- 身長:35cm
- 重量:1.7kg
- 脚部長さ:25cm
- 両腕を水平に伸ばした最大長:60cm
- 最大足裏サイズ:13.75cm
|
 |
たかぽん
- 第六回ロボプロチャレンジカップ チャレンジクラス優勝
- 第13回姫路ロボチャレンジエントリークラス総合2位
- 第3回JSRC全国大会第4位(姫路ロボチャレンジ選抜枠)
がんばるぞー
http://kyoukiyahonpo.blog102.fc2.com/ |
| 3 |
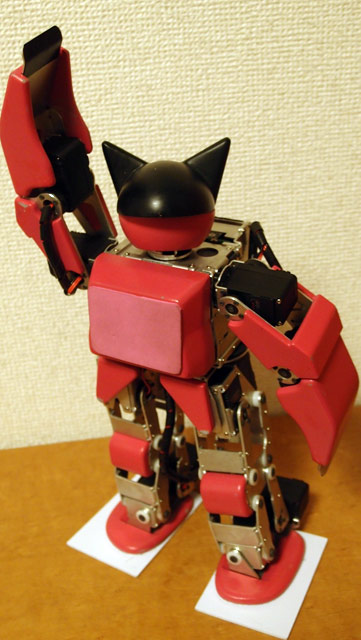
レグホーン
- サーボモーター数:25個
- 最大軸トルク:30kg/cm
- 身長:53cm
- 重量(規定は6kg以下):2.99kg
- 脚部長さ:28cm
- 両腕最大長:65cm
- 最大足裏サイズ:14cm
|
 |
NAKAYAN
- 第14回姫路ロボ・チャレンジ:バトルトーナメント優勝!、総合3位
- ROBO-ONE21:軽量級3位
- ロボ闘2012:準優勝
今回はセンサーを強化してさがしてポンをがんばります。
http://nakayanhobby.blog99.fc2.com/
|
| 4 |
アルマカンーV
- サーボモーター数:15個
- 最大軸トルク:30.6kg/cm
- 身長:41cm
- 重量:1.65kg
- 脚部長さ:25cm
- 両腕最大長:58cm
- 最大足裏サイズ:13cm
|
 |
ナッキィー
皆さんに負けないよう、一生懸命やります。
http://nakkye.at.webry.info/
|
| 5 |
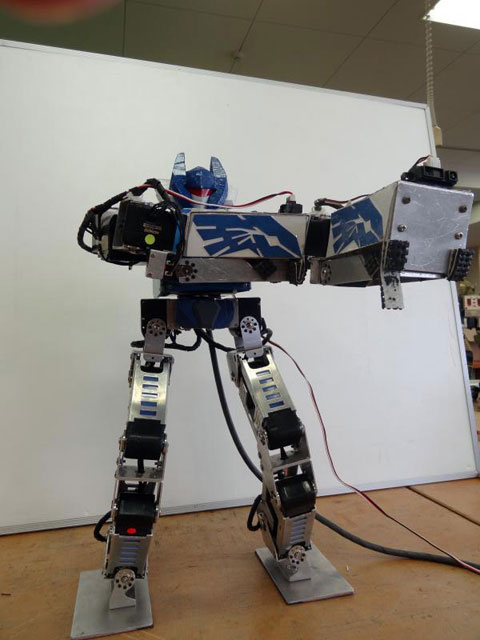
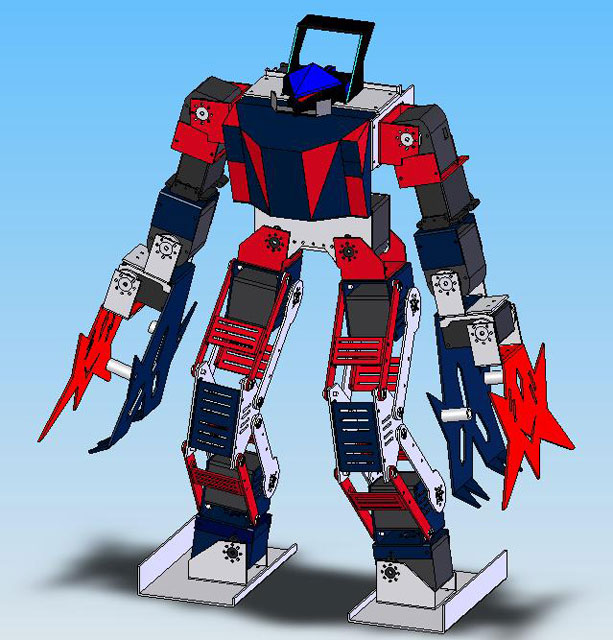
YOGOROZA(ヨゴローザ)
- サーボモーター数:24個
- 最大軸トルク:41kg/cm
- 身長:52cm
- 重量:2.96kg
- 脚部長さ:35cm
- 両腕を水平に伸ばした最大長:80cm
- 最大足裏サイズ:15cm
|
 |
だうと
- 第14回姫路ロボ・チャレンジ:総合2位
- 第13回姫路ロボ・チャレンジ:総合3位
ベストを尽くします。 |
| 6 |
テルル
- サーボモーター数:18個
- 最大軸トルク:5.0kg/cm
- 身長:-cm
- 重量:0.9kg
- 脚部長さ:14cm
- 両腕を水平に伸ばした最大長:16cm
- 最大足裏サイズ:9×6cm
|
 |
A4
JO-ZEROと同じサーボだ!負けるはずがない!!
http://blogs.yahoo.co.jp/a4_yuuya
|
| 7 |
XO3(エックスオースリー)
- サーボモーター数:23個
- 最大軸トルク:36.5kg/cm
- 身長:45cm
- 重量:2.7kg
- 脚部長さ:29cm
- 両腕を水平に伸ばした最大長:61.2cm
- 最大足裏サイズ:12.5cm
|
 |
Rruya
新しいの作りました、投げ飛ばされたい奴はかかって来い(笑)
http://ryuyasrobot.blog23.fc2.com/ |
| 8 |
Helios//Custom(ヘリオス//カスタム)
- サーボモーター数:19個
- 最大軸トルク:67kg/cm
- 身長:50.9cm
- 重量:2.84kg
- 脚部長さ:31cm
- 両腕を水平に伸ばした最大長:70cm
- 最大足裏サイズ:12cm
|
 |
ハイランド
初心者ですがよろしくお願いします。
http://bwrt.blog101.fc2.com/ |
| 9 |
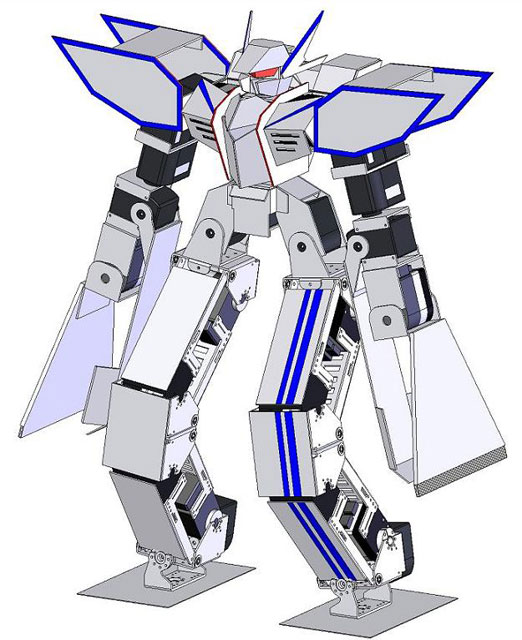
空牙(クウガ)
- サーボモーター数:21個
- 最大軸トルク:67kg/cm
- 身長:49cm
- 重量:2.95kg
- 脚部長さ:31cm
- 両腕を水平に伸ばした最大長:74cm
- 最大足裏サイズ:12.2cm
|
 |
ヨツモトリョウスケ
優勝目指して全力で頑張ります。
http://bwrt.blog101.fc2.com/ |
| 10 |
RIDER V(ライダー ブイ)
- サーボモーター数:19個
- 最大軸トルク:67kg/cm
- 身長:55cm
- 重量:3.0kg
- 脚部長さ:37cm
- 両腕を水平に伸ばした最大長:69cm
- 最大足裏サイズ:18×11cm
|
 |
清水湧斗
スタンダード2回目ですが、精一杯頑張ります。 |
| 11 |
ディファイアント
- サーボモーター数:22個
- 最大軸トルク:41.7kg/cm
- 身長:47cm
- 重量:2.4kg
- 脚部長さ:30cm
- 両腕を水平に伸ばした最大長:70cm
- 最大足裏サイズ:15×9cm
|
 |
大山 大樹
- 第14回姫路ロボ・チャレンジ エントリークラス 総合準優勝
スタンダード初出場で高校生最後の大会なので全力で頑張ります。 |
| 12 |
Gland Finale(グランド フィナーレ)
- サーボモーター数:19個
- 最大軸トルク:41.7kg/cm
- 身長:35.3cm
- 重量:1.9kg
- 脚部長さ:23.9cm
- 両腕を水平に伸ばした最大長:57.3cm
- 最大足裏サイズ:13×8cm
|
 |
中尾 颯生
今大会も優勝できるように頑張ります! |
| 13 |
BLIZARDO(ブリザルド)
- サーボモーター数:19個
- 最大軸トルク:41.7kg/cm
- 身長:44.6cm
- 重量:2.2kg
- 脚部長さ:29.7cm
- 両腕を水平に伸ばした最大長:68.2cm
- 最大足裏サイズ:12.2×7.2cm
|
 |
楢橋 祐季
- 第14回姫路ロボ・チャレンジ エントリークラス 総合優勝
精一杯頑張ります。宜しくお願いします。 |
| 14 |
鬼切(オニギリ)
- サーボモーター数:22個
- 最大軸トルク:67kg/cm
- 身長:51cm
- 重量:2.9kg
- 脚部長さ:27.7cm
- 両腕を水平に伸ばした最大長:66.5cm
- 最大足裏サイズ:13.5×8.2cm
|
 |
小西 亮
・・・・・・ |
| 15 |
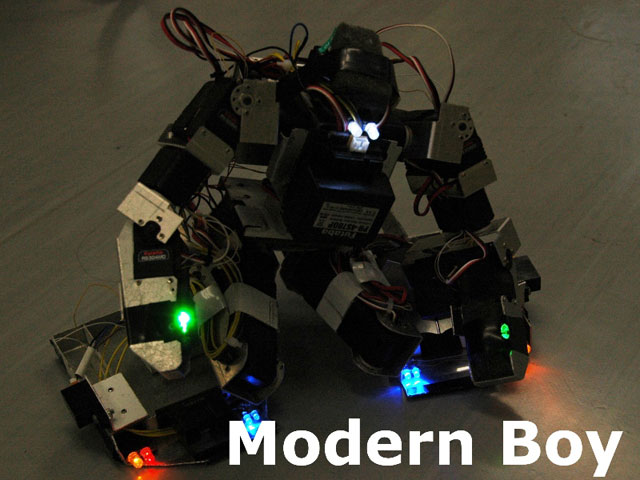
Modern Boy(モダンボーイ)
- サーボモーター数:20個
- 最大軸トルク:5kg/cm
- 身長:30cm
- 重量:0.8kg
- 脚部長さ:19.5cm
- 両腕を水平に伸ばした最大長:42cm
- 最大足裏サイズ:13.5cm
|
 |
やのはじめ |
| 16 |
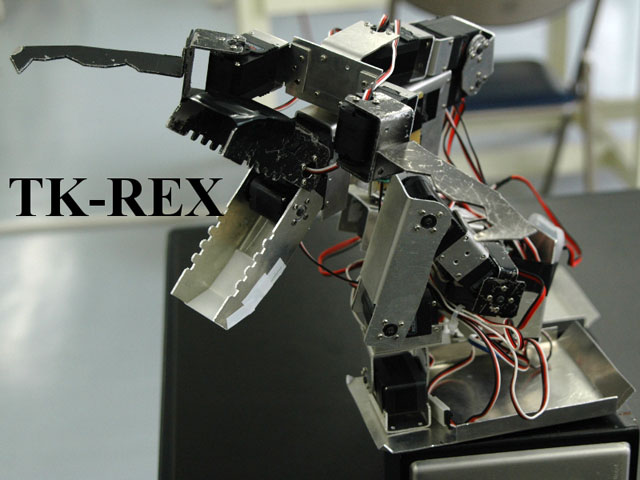
TK-REX改(ティケイレックス カイ)
- サーボモーター数:19個
- 最大軸トルク:5kg/cm
- 身長:-cm
- 重量:-kg
- 脚部長さ:19.5cm
- 両腕を水平に伸ばした最大長:-cm
- 最大足裏サイズ:14cm
|
 |
あかまつ |
| 17 |
Javelin(ジャベリン)
- サーボモーター数:20個
- 最大軸トルク:5kg/cm
- 身長:30cm
- 重量:0.8kg
- 脚部長さ:17.5cm
- 両腕を水平に伸ばした最大長:37.5cm
- 最大足裏サイズ:10.5cm
|
 |
Breaker |
| 18 |
カンタム
- サーボモーター数:20個
- 最大軸トルク:5kg/cm
- 身長:30cm
- 重量:0.8kg
- 脚部長さ:17.5cm
- 両腕を水平に伸ばした最大長:37.5cm
- 最大足裏サイズ:10.5cm
|
 |
やぎたか |
| 19 |
試作1号
- サーボモーター数:18個
- 最大軸トルク:28.5kg/cm
- 身長:45cm
- 重量:1.8kg
- 脚部長さ:26cm
- 両腕最大長:50cm
- 最大足裏サイズ:14×9.1cm
|
 |
柴田和諒
大阪工業大学の柴田和諒です。はたまた試作1号での参戦です。 |
| 20 |
シンプルファイター
- サーボモーター数:19個
- 最大軸トルク:9.1kg/cm
- 身長:35cm
- 重量:1.6kg
- 脚部長さ:20cm
- 両腕を水平に伸ばした最大長:47cm
- 最大足裏サイズ:11cm
|
 |
zeno |
| 21 |
エクセリオン
- サーボモーター数:15個
- 最大軸トルク:40.8kg/cm
- 身長:45cm
- 重量:2.6kg
- 脚部長さ:26cm
- 両腕を水平に伸ばした最大長:62cm
- 最大足裏サイズ:13cm
|
 |
はっし〜 |
| 22 |
JO-ZERO2
- サーボモーター数:24個
- 最大軸トルク:5kg/cm
- 身長:30cm
- 重量:0.9kg
- 脚部長さ:18cm
- 両腕を水平に伸ばした最大長:40cm
- 最大足裏サイズ:14cm
|
 |
いいんちょ |